Research & Impact
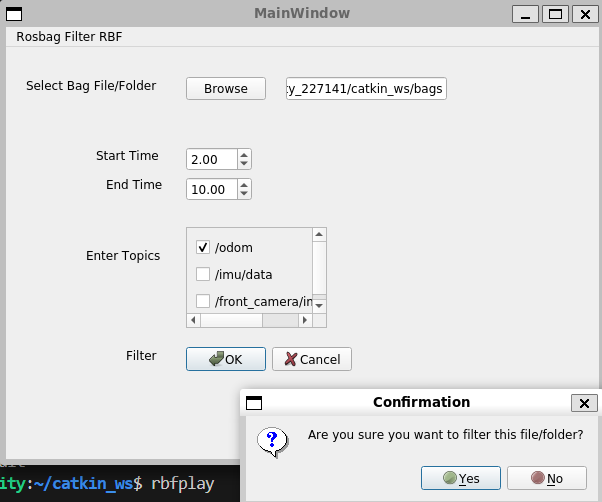
ROSbag Filtration (RBF) Tool — Robotics Research Intern, Texas A&M University
Autonomous vehicle sensor refinement system using Kalman filtering and signal-to-noise ratio analysis. Developed to remove static or low-quality data segments from ROS bag files, improving downstream modeling and state estimation reliability.
Rescue Operations Assistant (ROA)
Disaster response support system designed to assist emergency teams with real-time coordination and data analysis. Secured First Place in the National Science Foundation AACIC Competition.

Community Engineering — Gulfton Skate Park
Community-led engineering and fundraising initiative supporting the development of a million-dollar public skatepark in Houston. Contributed to design advocacy, youth engagement, and city coordination efforts.